

4011
Okuma

Robot Kol Malzemeleri
Robot Kol İçin Pleksiglas Kesimleri
https://www.robocombo.com/Pleksiglas-Robot-Kol,PR-1464.html
2 Adet JoyStick Modülü
https://www.robocombo.com/Joystik-Modulu-Joystick-Module,PR-1221.html
Arduino Uno Rev3
https://www.robocombo.com/Arduino-UNO-R3-Klon-CH340-USB-Cip-USB-Kablo-Hediye
Mini BreadBoard
https://www.robocombo.com/Mini-Breadboard,PR-1115.html
4 Adet SG90 Servo Motor
https://www.robocombo.com/SG90-RC-Servo-Motor,PR-141.html
Jumper Kabloları
https://www.robocombo.com/Arama.aspx?1&kelime=Jumper
Vidalar
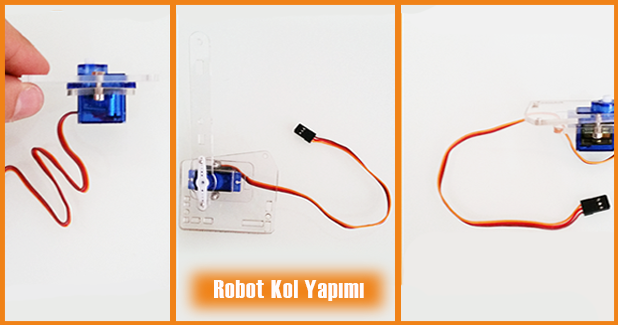
Robot Kol Yapım Aşamaları
1.

İlk olarak robot kolumuzun zemin parçalarını birleştirerek başlayacağız.
Zemin parçasına 4 adet 20mm vidayı aşağıdan yukarıya doğru takarak üzerine birer adet m3 somun takacağız.
2.
 Bir sonraki adımımız zemine bağlanacak olan motoru sabitleyeceğiz.
Bir sonraki adımımız zemine bağlanacak olan motoru sabitleyeceğiz.
3.
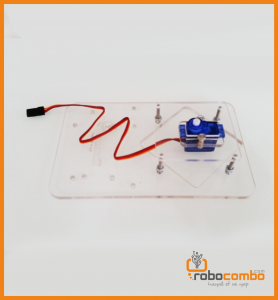 Zemin parçasının içerisinde bulunan parçaya servo motorumuzu bağladıktan sonra zeminde bulunan 4lü vidanın üzerine tutturalım.
Zemin parçasının içerisinde bulunan parçaya servo motorumuzu bağladıktan sonra zeminde bulunan 4lü vidanın üzerine tutturalım.
4.
 Bu aşamada bir diğer eksen motorumuzu sabitleyeceğiz.
Bu aşamada bir diğer eksen motorumuzu sabitleyeceğiz.
küçük kare parçamıza servo motorumuzu yerleştirip ucu büyük kare ye gelecek şekilde vidaladık tan sonra servo motorumuzun yanında gelen beyaz plastik parçayı uzun parçamıza takacağız.
5.
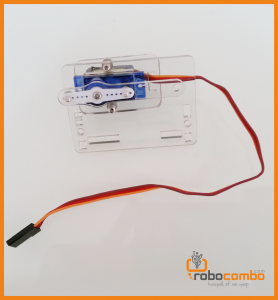
 Servo motorumuzu görselde gördüğümüz küçük dikdörtgen kesimimizin içinden geçirerek kafası büyük parçaya gelecek şekilde montajını gerçekleştireceğiz.
Servo motorumuzu görselde gördüğümüz küçük dikdörtgen kesimimizin içinden geçirerek kafası büyük parçaya gelecek şekilde montajını gerçekleştireceğiz.
Ardından uzun bombeli parçaya servo motorumuzun içerisinden çıkan uzun plastik parçayı vida ile tutturacağız.
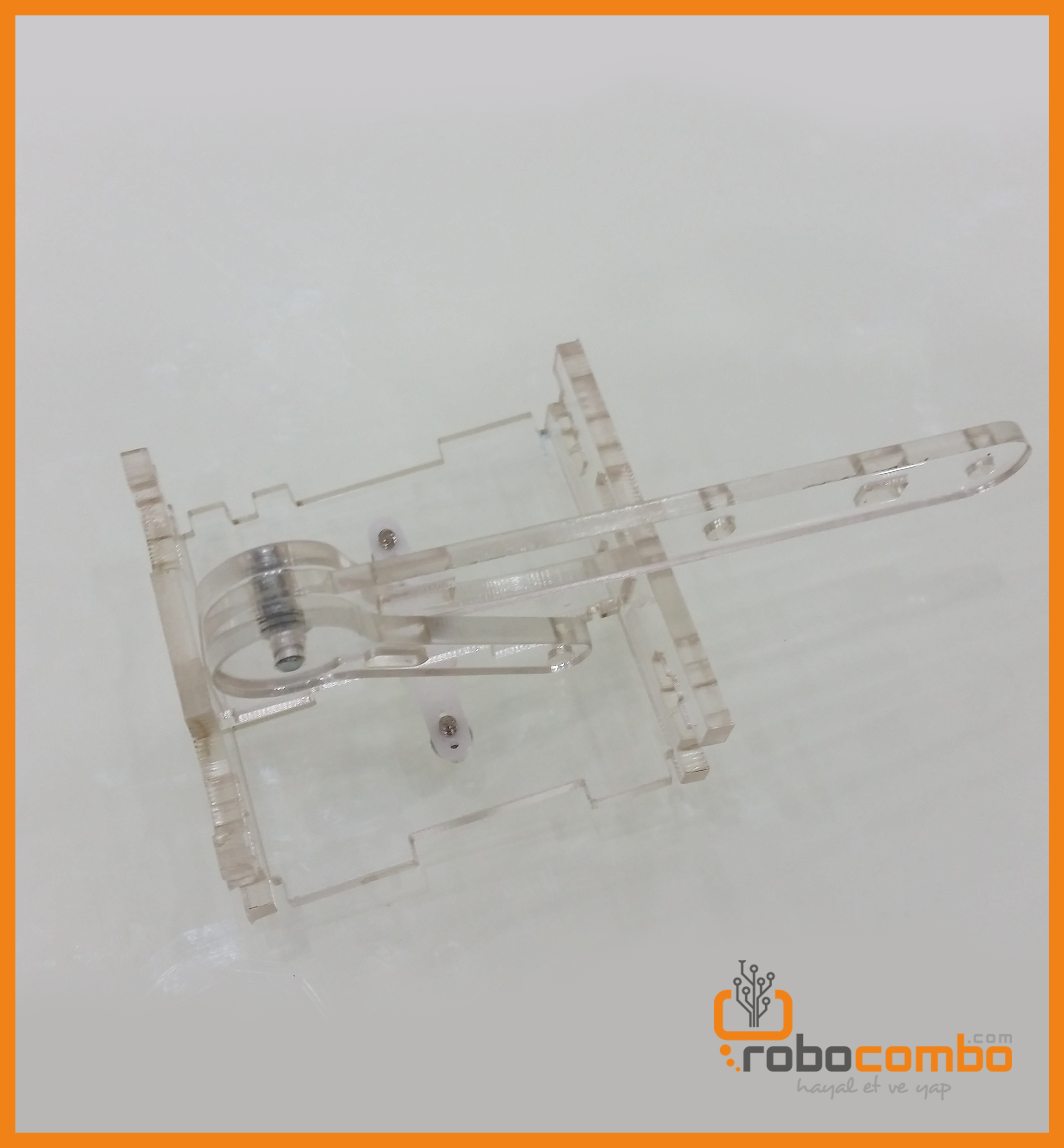
 Parçamızın tamamlanmış hali bu şekilde olacaktır.
Parçamızın tamamlanmış hali bu şekilde olacaktır.
6.

Robot kolumuzun zemindeki eksene bağlanması için servo motordan çıkan plastik parçamızı pleksiglas parçaya tutturacağız.
7.

Şimdiki monte edeceğimiz orta taşıma bölümünü birleştireceğiz.
8.

Buraya kadar motorları ve diğer küçük parçaların birleştirilmesini yaptık.
Bundan sonra birleştirilmiş parçaları kendi aralarında birleştirip son aşamaları tamamlayacağız.
9.
Semin eksenine oturtacağımız parçaları görselde göründüğü gibi birleştirerek diğer adıma geçiyoruz.
10.

Zemin parçasına oturtacağımız parçanın yan taraflarına uygun gelecek şekilde eksen motorlarının bulunduğu kanatları takacağız ve iki bombeli çubuğun arasına gelecek olan birleştirici parçayı vidalar ile sabitleyelim.
11.

Kol bölümünü ve zemin bölümünü motor aparatına gelecek şekilde yerleştirip vidasını takalım.
12.

13.

Bu adımda robot kolumuzun kıskaç bölümünü tamamlayacağız.
parçaları görselde göründüğü gibidir.
14.

Yan taraflarda minik parçalarımızı birbirine geçirerek alttan üste doğru vidalama işlemini yapacağız.
15.

Kıskaç parçalarını görselde göründüğü gibi takıp üzerine gelecek parçanın ince kısmının bulunduğu yere uzun vida atılması gerekiyor.
16.

Servo motorun plastik parçasını plesksiglas dan kestiğimiz parçamıza takarak motora monte ediyoruz.
17.
Son olarak kıskaç bölümünün hareket etmesi için kestiğimiz dişliyi vidalayıp robot kolumuza monte ediyoruz.





Yorumlar 0