Terminoloji
Çeşitler
| ARF | ” Neredeyse Uçmaya Hazır “: Uçmak için gerekli neredeyse tüm parçaları birleştiren bir İHA. Denetleyici ve alıcı gibi bileşenler dahil edilmez. |
| BNF | ” Bağla ve Uç “; İHA tamamen monte edilmiş olarak gelir ve bir alıcı içerir. Uyumlu bir verici seçmeniz ve alıcıya “bağlamanız” yeterlidir. |
| DIY | ” Kendin Yap “, ki şimdi yaygın olarak “özel” anlamını taşır. Bu, normal olarak, çeşitli tedarikçilerin parçalarını kullanmayı ve parçaları oluşturmayı veya değiştirmeyi içerir. |
| Drone | Bu İHA ile eşanlamlıdır. “Drone” terimi askeri kullanım için daha yaygın olarak görülürken “İHA”, hobi kullanımı için daha yaygın olarak görülüyor |
| Heksakopter |
Altı motor / pervane olan bir İHA. |
| Multirotor | “Multirotor” sadece birden çok rotorlu bir uçak anlamına gelir |
| Octocopter | Sekiz adet motor / pervaneye sahip bir İHA. |
| Quadcopter | Dört motor / pervane ve dört destek koluna sahip bir İHA. Konfigürasyonlar normalde “+” (İHA’nın önü kollardan birine bakar) veya “X” (uçağın önü iki kol arasında yüzler). |
| RTF | ” Uçmaya Hazır “: Gerekli tüm parçaları bir araya getiren İHA. Sadece pili şarj edin ve uçun! |
| Boyut (mm) | “Boyut” genellikle milimetre cinsinden (örn. 450 mm) sağlanır ve İHA’daki iki motor arasındaki en büyük nokta-uzaklık mesafesini temsil eder. Boyut ayrıca Drone’un “sınıfı” nı ( mikro, mini vb.) Belirleyebilir |
| Örümcek | Bir “Spyder” tipi İHA (normalde dörtlü veya altılı), destek kollarının üstten bakıldığında bot haxes’de simetrik olmadığı bir yerdedir. |
| Trikopter | Üç motor / pervane ve genellikle üç destek koluna sahip bir İHA |
| İHA | ” İnsansız Hava Aracı ” (her çeşit) |
| V-Tail | Dört kola sahip olan ve arka iki ucu “V” çizgisi oluşturmak için açılı olan bir İHA, |
| X4 / X8 | X4 ve X8 dört destek kollu İHA yapılandırmalarıdır; X4 konfigürasyonlarının her kolun ucunda bir motoru bulunurken, X8’in kol başına iki motoru vardır (bir tanesi yukarı bakacak, diğeri aşağı bakacak şekilde) |
| Y3 / Y6 | Y3 ve Y6, üç destek koluna sahip İHA yapılandırmalarıdır; Y3 konfigürasyonlarının her bir kolun ucunda bir motoru bulunurken, Y6’nın kol başına iki motoru vardır (bir tanesi yukarı bakacak, diğeri aşağı bakacak şekilde) |
|
Quadcopter |
V-Tail |
 Octocopter Çerçevesi Octocopter Çerçevesi |


Mekanik
| CG | ” Ağırlık merkezi “; Uçaklarda, her iki tarafa da eşit ağırlık verildiği nokta budur. |
| Kelepçe | Bir “tüp kelepçesi”, başka bir aygıta (motor bagajı veya Drone gövdesi gibi) bağlamak için normalde yuvarlak bir tüp üzerinde kullanılan bir cihazdır. |
| Konektörler | Kabloları sökmek ve sökmek için kabloların uçlarında konektörler kullanılır. Piller için ortak konektörler Deans & XT60, uçuş kumandası ve sensörler için konektörler ise 0,1 “aralıklı |
| Nemlendiriciler | Bunlar Drone boyunca iletilen titreşimi en aza indirmek için kullanılan kalıplanmış kauçuk parçalardır |
| Çerçeve | Çerçeve, uçağın “iskeleti” ne benzemekte ve parçaları bir arada tutmaktadır. Basit çerçeveler, daha sonra merkezi bir gövdeye bağlanan alüminyuma veya diğer hafif ekstrüzyonlara (“kol”) bağlı motorlara sahiptir. |
| G10 | Bu, Drone’un çerçevesini oluşturmak için karbon elyaf yerine yaygın olarak kullanılan, çok katı ve hafif olduğundan, ancak önemli ölçüde daha ucuz |
| İniş takımı |
Çok turlu iniş takımı normalde, bir uçakta bulabileceğiniz gibi tekerlekleri yoktur – bu, yerdeyken hareket etmesini önlemek ve toplam ağırlığı azaltmaktır. |
| LED | ” Işık Yayan Diyot “. Bunlar Drone’u öncelikle gece veya düşük aydınlatma koşullarında görünür hale getirmek için kullanılır. |
| Muhafız Muhafızları | “Pervane muhafızları”, pervanenin diğer nesnelerle temasını önlemek için bir pervanenin çevresini saran bir malzemedir. Bunlar bir emniyet unsuru ve Drone hasarını en aza indirmenin bir yolu olarak uygulanmaktadır. |
| Geri çek | “Geri çekilebilir” normal olarak iki pozisyona sahip iniş takımına atıfta bulunur: biri iniş ve kalkış, diğeri de uçuş esnasında daha az yer kaplıyor veya görünürlüğü artırıyor. |
| Kabuk | Bu, elemanlara direnci arttırmak ve bazen aerodinamiği geliştirmek için kullanılan estetik / fonksiyonel bir kapaktır. Bazı üretim Drone’larında sadece “çerçeve” olarak işlev gören plastik bir kabuk bulunur. |
 Anti-Titreşim Sönümleyici |
Basit İniş Takımları |
 Drone / İHA Muhafaza |
Tahrik
| BEC | ” Battery Eliminator Circuit “: ESC’ye dahil olan ve ona ihtiyaç duyan herhangi bir elektronik cihaza düzenlenmiş 5V DC güç sağlayabilen bir voltaj regülatörü. |
| Bıçaklar | Pervane bıçakları, kaldırma üreten aerodinamik yüzeydir. Bir pervane normal olarak sabitlenebilen veya katlanabilen iki ila dört bıçağa sahiptir. |
| CW / CCW | CW, Saat yönünde dönüşü ve CCW, Saat yönünün tersine dönüşünü belirtir . Çok rotorlu bir uçaktaysa, normal olarak karşı dönen pervanelerin çiftlerini kullanırsınız. |
| ESC | ” Elektronik Hız Denetleyicisi “, aküye, motora ve uçuş kontrol cihazına bağlanan ve motorun dönme hızını kontrol eden cihazdır. |
| LiPo | ” Lityum Polimer “, hafif (depolama kapasitesine karşı) ve yüksek akım deşarj oranları nedeniyle, dronlarda ve İHA’larda kullanılan en yaygın pildir. Piyasada bulunan diğer tipte Lityum-bazlı piller de vardır (LiFe, LiMn, LiOn vs) |
| Motor | Pervaneleri döndürmek için kullanılan motordur. küçük insansız hava araçları içinde, bir fırçalanmış motorlu çoğunlukla büyük İHA’ların için ise, bir “kullanılır fırçasız ” Motor çok daha yaygın olduğunu |
| PCB | Bir ” Baskılı Devre Kartı “, düz fiberglas parçası olup birçok bileşeni lehimlenmiştir. Pek çok elektronik ürünün bir PCB si var. |
| Güç Dağıtımı |
Bir Drone’da kullanılan pek çok farklı cihazı çalıştırmak için, pilin bölünmesi gerekir; burada Güç Dağıtımının (devre kartı veya kablo) devreye girer. Pilin tek pozitif ve negatif terminallerini alır ve diğer cihazların (aynı voltajda çalışan) güç alabileceği birçok farklı terminal / bağlantı noktası sağlar. |
| Pervane | Pervaneler itme kuvveti sağlar ve helikopter yerine uçaklarda kullanılanlara benzer . |
| Prop Adaptörü | Pervaneyi motora bağlamak için kullanılan bir cihaz. |
| Saver Tasarrufu | Motorunuzun üzerine monte edilen ve pervane adaptörünün yerine geçen bir tür göbeği. Kaza durumunda, pervaneyi kurtarma girişiminde pervanenin bir kısmı kaybolur. |
| Servo | Servo, doğru sinyali sağladığı belirli bir açısal konuma hareket edebilen bir tür aktüatör türüdür |
| Itme | “İtki”, belirli bir motorun ve pervanenin (belirli bir voltajda) sağlayabileceği kuvvettir. Genellikle kilogram (Kg) veya pound (Lbs) cinsinden ölçülür |
|
LiPo Pil |
 CW / CCW Pervaneler |
 Güç Dağıtım Panosu |

Kontrol
| Taban / zemin / Kontrol İstasyonu |
Elde taşınan verici yerine (veya ek olarak) bir Drone kontrol etmek için kullanılan gerekli bileşenleri barındıracak / entegre etmek için bir istasyon (normalde bir durumda tripoda monte edilmiş veya bir tripoda monte edilmiş) kullanılır. Bu, verici, anten (e), video alıcısı, monitör, pil, bilgisayar ve diğer cihazları içerebilir. |
| Bağlama | “Bağlama” terimi, elle kullanılan bir vericinin bir alıcıyla iletişim kurabilmesi için yapılandırılmasını ifade eder; Bir verici bir alıcı ile birlikte gelirse, fabrikada yapılmış olmalıdır. |
| Kanal | Bir vericideki kanal sayısı, gönderebileceği ayrı sinyaller sayısıyla ilgilidir |
| Uçuş Kontrolörü | “Uçuş Kontrolörü”, Drone’un “beyin” ı olarak düşünülmüş ve tüm veri işlemeyi, hesaplamaları ve sinyalleri işlemektedir. Uçuş kontrolörünün çekirdeği genellikle programlanabilir bir “mikro denetleyici” dir. Uçak kontrol cihazı, bir ivmeölçer, jiroskop, barometre, pusula, GPS vb. De dahil olmak üzere birden fazla sensöre sahip olabilir . Uçuş denetleyicisi uçakları tek başına kontrol edebiliyorsa (örneğin, belirli GPS koordinatlarına gitmek için). “Otopilot” olarak kabul edilir. |
| Kablo Demeti | Bu genellikle alıcıyı uçuş kumandasına (ve bazen de diğer cihazlara) bağlayan teller olan “Kablo Demeti” ne değinmektedir. |
| HF / UHF / VHF | ” Yüksek Frekans “; ” Çok Yüksek Frekans ” ve ” Ultra Yüksek Frekans ” radyo dalgaları . Birimler Hz’dir (Hertz) |
| Alıcı | Kablosuz olarak alınan bilgileri işleyen şey budur |
| Eskiz / Kod | Drone’un uçuş kontrol cihazına yüklenen programdır (“düşünce sürecine” benzemektedir) |
| Verici / Radyo |
“Verici”, alıcıya kablosuz olarak kontrol sinyali (sinyalleri) üreten şeydir |
 Baz istasyonu |
 Verici – Kumanda |
 Uçuş Kontrolörü |
Sensörler / Oryantasyon
| Hız ölçer | Bir ivmeölçer, bir ila üç eksende doğrusal ivmeyi ölçer. Birimler normalde ‘g’ veya yerçekimindedir. Bir ivmeölçer, drone’un zemine göre yönelimini sağlayabilir |
| Anten | Antenler aslında Drone’a sinyal gönderir veya gönderir (sinyal kendisi bir verici ünitesi tarafından üretilmiştir). Farklı türlerde gelirler ve yönlü (tek yönde en güçlü) ve çok yönlü |
| Barometre / Basınç / Altimetre |
İHA’nın yüksekliği hakkında geribildirim vermek için bir Barometre kullanılır. Basıncı ölçer ve basınç yükseklik ile değiştiğinden, uçağınız yüksekliğini “bilebilir”. |
| Pusula | Manyetik bir pusula pusulanızın yönünü (kuzey / güney / doğu / batı) sağlayabilir |
| Uçuş Kaydedici | Bir uçuş kaydedici Drone’daki sensör değerlerini kaydeder. Bu özellik bazen uçuş kumandasına entegre edilebilir. |
| Küresel Konumlama Sistemi | ” Küresel Konumlandırma Sistemi “: Gezegende yörüngedeki uydular, GPS anteni tarafından toplanan ve coğrafi koordinatları sağlamak için GPS alıcısı tarafından işlenmek üzere gönderilen sinyalleri gönderir |
| Jiroskop | Bir jiroskop, bir eksenden birinde açısal ivmeyi ölçer. Birimler normalde ikinci kareler derece cinsindendir. |
| IMU | ” Atalet Ölçüm Birimi “, bir akremometre ve bir jiroskop |
| Magenetometre | Düşük maliyetli robotlarda bazen pusula yönünü sağlamak için bir manyetometre kullanılır |
| Pitch/Eğim | Eğim, burnun zemine göre kuyruk açısıdır, başka bir deyişle uçağın eksenden kanattan kanata dönüşüdür |
| Pitot Tüpü | Hava hızını ölçen bir cihaz |
| Roll/Yuvarlama | Roll/Yuvarlama, uçakların eksende burnundan kuyruğuna dönüşüdür. |
| Yaw/Rota | Yaw/Rota, bir uçağın, burun / kuyruk ve kanat uçları arasında oluşan düzleme dik (90 derece) bir eksen etrafında dönmesi demektir |
|
Yuvarlama / Eğim / Rota |
Hava Hızı Sensörü |
GPS Modülü |



Video
| FPV | ” First Person View “: Drone, bir kamera ile monte edildi ve operatör, bir monitörde veya sanal gerçeklik gözlüklerinde görüntülenen bir canlı video kaynağına sahip. |
| Gimbal |
Kamera taşıyan ve normalde servo motor veya fırçasız bir DC motor kullanılarak çalıştırılan cihazlar. Uçuş sırasında bir kamerayı dengeleyebilen bir parmak izi. |
| GoPro | GoPro serisi hareketli kameralar, video alımı ve / veya aktarımı için yaygın olarak kullanılır |
| LCD | ” Sıvı Kristal Ekran “, alıcı tarafından alınan görüntüyü görüntülemek için kullanılan bir ekran / monitör türüdür |
| OSD | ” On Screen Display “, uçaktan gönderilen (yükseklik, GPS konumu vb. Içerebilir) monitör / ekran üzerinde metin sağlar. |
| VR | ” Sanal Gerçeklik” gözlükleri veya gözlükler, operatöre daha “kapsamlı” bir deneyim kazandırır |
|
2 Eksenli Gimbal |
FPV için LCD Monitör |
VR Gözlükler |



Gerçekten Özel Bir İHA / Drone İstiyor musunuz?
Drone seçimi, alan hakkında ne kadar çok şey öğrenmek istediğinize bağlıdır. Özel bir Drone oluşturmak tehlikeli olduğu kadar oldukça karışabilir. Hızlıca “havaya uçmayı” tercih ederseniz, artan karmaşıklık derecesinde aşağıdakileri önermek isteriz:
Oyuncak
Çok-rotorlu oyuncaklar giderek popüler hale geliyor. Çoğu küçüktür ve AR Drone Parrot gibi bazıları daha büyük olsa da avuç içine sığabilir. Oyuncak çoklu rotor Drone’ların uçması zorunlu değildir, ancak çökmelere karşı daha dayanıklıdır. Oyuncaklar daha küçük olma eğilimindedir ve çerçeveyi estetik kabuğa entegre eder.
RTF
“Uçmaya Hazır” kiti, eksiksiz bir Drone için gereken tüm parçaları içerir. Parçaları, Drone’un kendisi (çoğunlukla önceden monte edilmiş ve önceden kablolu), el vericisi, bir pil ve şarj cihazı içerir. Zanaat kalibre edildi ve nispeten kolaylıkla uçabilmeliydi. Bununla birlikte, bunlar yıkılmaz değildir ve kaza, sistemi onarmaya çalışmak yerine yeni bir uçak almaya değer olduğu noktaya kadar sisteme zarar verebilir.
ARF
“Hemen hemen uçmaya” hazırlama kiti, çerçevenin, motorların ve “çekirdek” parçaların çoğunun dahil edildiği ve tamamen monte edildiği (ya da nakliye için çoğunlukla yardımcı olması için birkaç parçanın birleştirilmesi gereken) bir kittir. Normalde bir ARF kiti, bir verici / alıcı ve belki de piller ve şarj cihazı eklemeyi gerektirir. Diğer ARF kitleri uçuş kontrolörünün kendisini kapsamaz. Gerekli ek parçalar nedeniyle biraz kalibrasyon yapmanız gerekebilir. BNF kiti önermiyoruz, çünkü tüm vericiler ve alıcılar birbirleriyle uyumlu değildir.
Drone / İHA Kiti
Bir kit, normalde bir Drone oluşturmak için gerekli olan önemli ürünlerin çoğunu içerir, ancak verici / alıcı, pil ve şarj cihazı veya uçuş denetleyicisi dahil olmayabilir. Farklı kitlerin paket içeriği farklıdır, dolayısıyla tam olarak neyin içerildiğini ve hangi ek öğelerin gerekli olacağını görmek önemlidir. Kitin içeriği birbiriyle uyumlu olmalıdır.
Özel
Özel bir kurulum, çeşitli farklı üreticilerin farklı ürün çeşitlerini bir araya getirip birlikte çalışmalarını sağlamaktır. Bu yaklaşım Drone yapmak için hangi bileşenlerin gerekli olduğunu ve bu makale dizisinin odağı olduğunu anlamanızı gerektirir.
]]>
Robot Kol Malzemeleri
Robot Kol İçin Pleksiglas Kesimleri
https://www.robocombo.com/Pleksiglas-Robot-Kol,PR-1464.html
2 Adet JoyStick Modülü
https://www.robocombo.com/Joystik-Modulu-Joystick-Module,PR-1221.html
Arduino Uno Rev3
https://www.robocombo.com/Arduino-UNO-R3-Klon-CH340-USB-Cip-USB-Kablo-Hediye
Mini BreadBoard
https://www.robocombo.com/Mini-Breadboard,PR-1115.html
4 Adet SG90 Servo Motor
https://www.robocombo.com/SG90-RC-Servo-Motor,PR-141.html
Jumper Kabloları
https://www.robocombo.com/Arama.aspx?1&kelime=Jumper
Robocombo.com’da Pleksiglas Robot Kol Kitini “https://www.robocombo.com/Pleksiglas-Robot-Kol-Kiti,PR-1465.html” linkini ziyaret ederek görebilirsiniz.
Vidalar
- Nut x 11
- M3 6mm 7 Adet
- M3 8mm 15 Adet
- M3 10mm 5 Adet
- M3 12mm 8 Adet
- M3 20mm 4 Adet
Robot Kol Yapım Aşamaları
1.

İlk olarak robot kolumuzun zemin parçalarını birleştirerek başlayacağız.
Zemin parçasına 4 adet 20mm vidayı aşağıdan yukarıya doğru takarak üzerine birer adet m3 somun takacağız.
2.
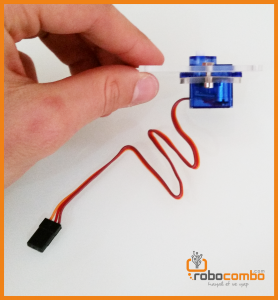 Bir sonraki adımımız zemine bağlanacak olan motoru sabitleyeceğiz.
Bir sonraki adımımız zemine bağlanacak olan motoru sabitleyeceğiz.
3.
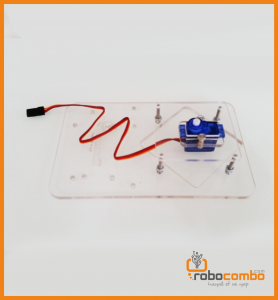 Zemin parçasının içerisinde bulunan parçaya servo motorumuzu bağladıktan sonra zeminde bulunan 4lü vidanın üzerine tutturalım.
Zemin parçasının içerisinde bulunan parçaya servo motorumuzu bağladıktan sonra zeminde bulunan 4lü vidanın üzerine tutturalım.
4.
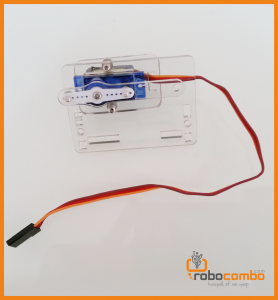 Bu aşamada bir diğer eksen motorumuzu sabitleyeceğiz.
Bu aşamada bir diğer eksen motorumuzu sabitleyeceğiz.
küçük kare parçamıza servo motorumuzu yerleştirip ucu büyük kare ye gelecek şekilde vidaladık tan sonra servo motorumuzun yanında gelen beyaz plastik parçayı uzun parçamıza takacağız.
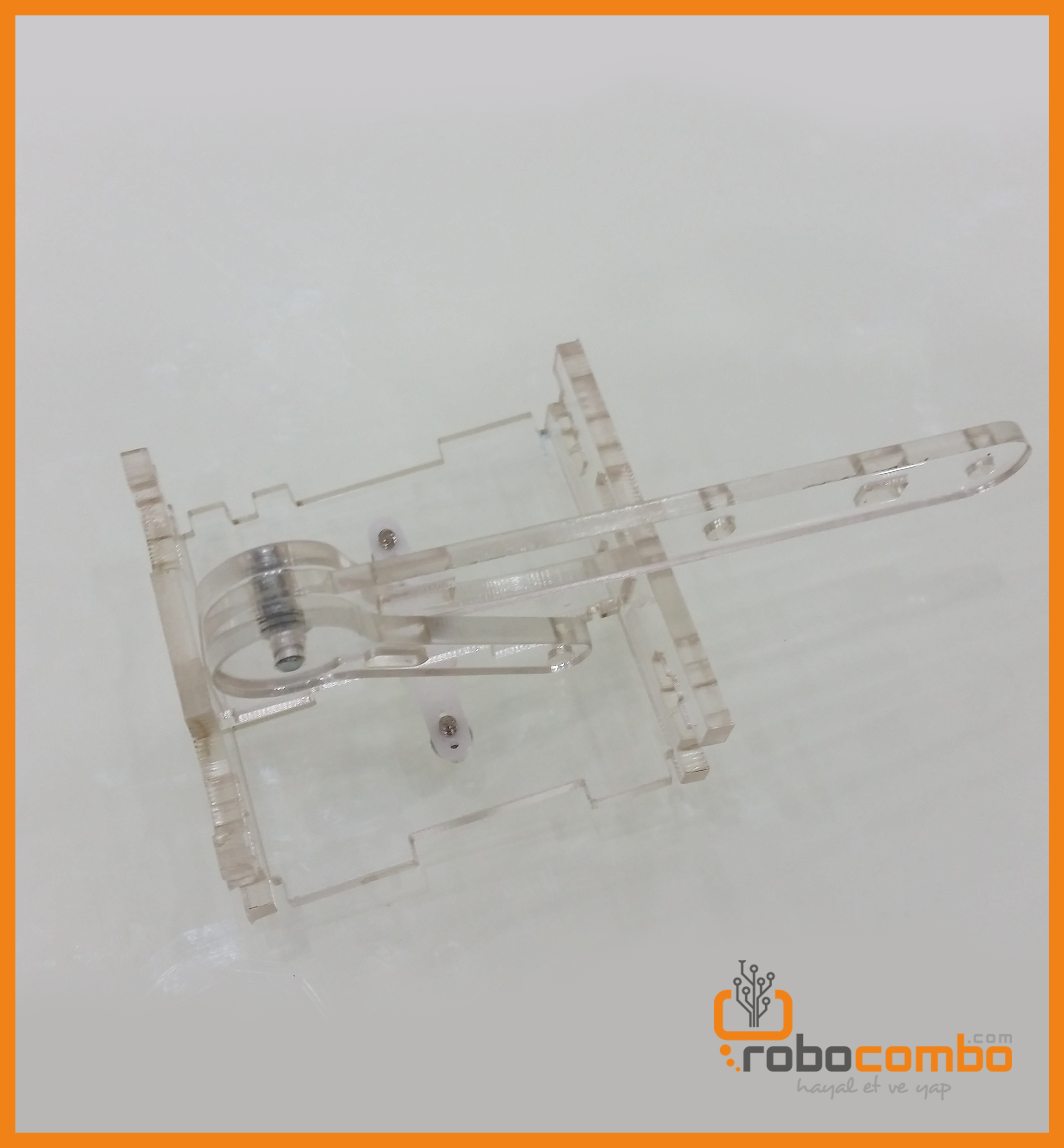
5.
 Servo motorumuzu görselde gördüğümüz küçük dikdörtgen kesimimizin içinden geçirerek kafası büyük parçaya gelecek şekilde montajını gerçekleştireceğiz.
Servo motorumuzu görselde gördüğümüz küçük dikdörtgen kesimimizin içinden geçirerek kafası büyük parçaya gelecek şekilde montajını gerçekleştireceğiz.
Ardından uzun bombeli parçaya servo motorumuzun içerisinden çıkan uzun plastik parçayı vida ile tutturacağız.
 Parçamızın tamamlanmış hali bu şekilde olacaktır.
Parçamızın tamamlanmış hali bu şekilde olacaktır.
6.

Robot kolumuzun zemindeki eksene bağlanması için servo motordan çıkan plastik parçamızı pleksiglas parçaya tutturacağız.
7.

Şimdiki monte edeceğimiz orta taşıma bölümünü birleştireceğiz.
8.

Buraya kadar motorları ve diğer küçük parçaların birleştirilmesini yaptık.
Bundan sonra birleştirilmiş parçaları kendi aralarında birleştirip son aşamaları tamamlayacağız.
9.
Semin eksenine oturtacağımız parçaları görselde göründüğü gibi birleştirerek diğer adıma geçiyoruz.
10.

Zemin parçasına oturtacağımız parçanın yan taraflarına uygun gelecek şekilde eksen motorlarının bulunduğu kanatları takacağız ve iki bombeli çubuğun arasına gelecek olan birleştirici parçayı vidalar ile sabitleyelim.
11.

Kol bölümünü ve zemin bölümünü motor aparatına gelecek şekilde yerleştirip vidasını takalım.
12.

13.

Bu adımda robot kolumuzun kıskaç bölümünü tamamlayacağız.
parçaları görselde göründüğü gibidir.
14.

Yan taraflarda minik parçalarımızı birbirine geçirerek alttan üste doğru vidalama işlemini yapacağız.
15.

Kıskaç parçalarını görselde göründüğü gibi takıp üzerine gelecek parçanın ince kısmının bulunduğu yere uzun vida atılması gerekiyor.
16.

Servo motorun plastik parçasını plesksiglas dan kestiğimiz parçamıza takarak motora monte ediyoruz.
17.
Son olarak kıskaç bölümünün hareket etmesi için kestiğimiz dişliyi vidalayıp robot kolumuza monte ediyoruz.
]]>Bir sistemin kontrol edilmesi için o sistemle bir iletişimin kurulması gerekmektedir. Asıl mesele iletişimin nasıl bir ortamda ve hangi şartlar altında (mesafe, ortam, elektromanyetik alan, hız, vb.) gerçekleşeceğini belirlemektir. Ardından bütün bu şartlar göz önünde alınarak en uygun iletişim biçimi saptanmalıdır. Örneğin bu projede çok uzak mesafeden erişim gerekmemekle birlikte kablosuz bir protokol kullanılmalıdır. Bu durumda bluetooth bizim işimizi çözmektedir. Fakat çok daha uzak mesafelerden ulaşmak istendiği zaman internet gibi daha kapsamlı bir iletişim protokolü kullanmak gerekecektir.
Projenin yazılım kısmına bakılacak olursa gömülü yazılım Arduino’nun arayüzü ile, android yazılımı ise App Inventor programı ile yazılmıştır. Android cihazdan gönderilen veriler, HC06 bluetooth modülü üzerinden Arduino UNO’ya gönderilmektedir. Arduino ise gelen verilerin gerekli şartları sağlaması halinde L298 Motor Shield’i tetikleyerek motorların gereken yön ve hızda dönmesini sağlamaktadır.
L298 Motor Shield, çoğu motor sürücü kartların aksine hem 2A gibi yüksek akım değerlerinde çalışabilmesi hem de modüler olarak üzerinde çevre elemanların takılmasını sağlayan soketler bulundurması açısından diğer sürücü kartlarından ayrılmaktadır. Üzerinde dahili olarak DC, step ve servo motorları için soketler bulunduran Shield, buna ilaveten bluetooth ile dijital ve analog pinler için de soketler barındırmaktadır. Bu özellikleri sayesinde çevre elemanları da Shield üzerine takılabilmekte ve bütün bir yapı ihtiva etmektedir.
L298 motor shield, çoğu motor sürücüye göre daha güçlü ve nitelikli bir sürücüdür. Üzerinde step, DC ve servo motorların takılabileceği soketler bulundurduğu gibi HC06 bluetooth modüllerinin takılabileceği 4 pinli soket de barındırmaktadır. L298P entegresinin güç verdiği motor sürücüde aynı anda 2 DC motor veya 1 step/servo motor sürülürken kanal başına 2A akım verebilmektedir. Ayrıca üzerinde bulundurduğu klemensler yardımıyla motor enerjisi harici bir kaynaktan alınabilmektedir. Ayrıca shield üzerindeki buzzer sayesinde istenen şartlarda ses vermesi sağlanabilmektedir.
4WD Araç Platformu (DIY)
Bu ürün demonte olarak gelen bir araç kitidir. Ürünün içerisinde, gerekli olan bütün mekanik parçalar ile motor ve tekerlekler bulunmaktadır. Fakat kit içeriğinde elektronik sistemin bulunmaması nedeniyle gerekli olan bu sistemin kullanıcı tarafından tasarlanması gerekir. Araç üzerinde, tasarladığınız elektronik kartlar ve sensörleri kolayca yerleştirebileceğiniz alanlar bulunmaktadır.
Kit İçeriği
• 4 Adet – 65mm çaplı tekerlek.
• 4 Adet – Plastik dişlili redüktörlü motor + enkoder diski.
• 2 Adet – Alt ve üst olmak üzere plexiglass araba gövdesi.
• Pil yuvası.
• Mekanik ve elektronik bağlantı parçaları.
http://www.robocombo.com/4WD-Arac-Platformu-DIY,PR-1135.html
L298 Motor Sürücü Shield

L298 Motor Shield, üzerinde barındırdığı VMS klemensinden veya Arduinonun Vin pininden beslenebilmektedir. VMS klemensinden verilen enerji shield’e bağlı tüm motorların beslenmesinde kullanılmaktadır. Ayrıca bu girişten verilen enerji shield üzerindeki OPT jumperi kullanılarak Arduinonun Vin pinine bağlanmaktadır. Eğer Arduino ve Shield ayrı ayrı beslenirse bu jumper pinlerinin birbirinden ayrılması gerekir. Aynı durum Arduino beslemesi için de geçerlidir. Arduinonun DC soketinden verilen enerji eğer OPT jumperi aktifse aynı zamanda shield ile motorları da besler. Motorların fazla akım çekmesi durumunda arduinodan yapılan besleme sıkıntı doğurabilmektedir ve VMS pininden yapılan enerji daha avantajlıdır.
Motor Shield üzerindeki 4 pinli bluetooth soketi Arduino’nun TX ve RX pinleri ile 3,3V ve GND pinlerine bağlıdır. HC06 bluetooth modülü direk bu pinlere bağlanarak kolayca kullanılabilmektedir.
Teknik Özellikler
• Tetikleme gerilimi: 5V
• Motor Besleme Gerilimi (Vin Pini Bağlı Olduğu Durumda) : 7-12V
• Motor Besleme Gerilimi (Vin Pini Bağlı Değilse) : 4,8-24V
• Maksimum Motor Akımı: 2A
• Motor A Pinleri:
• D12: Yön Belirleme Pini
• D10: PWM Girişi
• Motor B Pinleri:
• D13: Yön Belirleme Pini
• D11: PWM Girişi
• Buzzer Pini: D4
http://www.robocombo.com/Arduino-L298-Motor-Shield,PR-50.html
HC06 Bluetooth Modülü
HC06 Bluetooth Modülü, üzerinde CSR firmasına ait BC417 bluetooth çipi bulunan ve Bluetooth 2.0+EDR destekleyen bir karttır.
HC06 modülünün iki farklı modeli vardır. İlk modelde (HC06 Bluetooth Modülü-A2E7X) çip ve çeşitli devre elemanları bir kart üzerinde dizilmiş olarak bulunmaktadır. Ayrıca kart üzerinde gerekli anten dizaynı optimize edilmiş olarak gelmektedir. Bu tip kartlar PCB tasarımlarında lehimleme kolaylığı açısından daha kullanışlıdır.
İkinci ve daha çok tercih edilen modelde (HC06 Bluetooth Modülü (Pin Çıkışlı)-A2E7Y) ise ilk modelin gerekli pinleri ve haberleşme lojik seviyesi ayarlanmış şeklinde bulunmaktadır. Bu modelin üzerinde ikinci bir kart bulunup gerekli pinlerin dışarı alınması sayesinde herhangi bir lehimleme yapılmadan kullanıma uygundur. Böyle bir tasarım hobi ve robotik uygulamalarda kullanım kolaylığı açısından idealdir.
Modülün haberleşme bağlantısı serial(UART) olduğundan hızlı ve kolay bir kullanımı vardır. Ayrıca bu pinler yardımıyla AT komutlarını kullanarak modülün baud rate değeri, isim, şifre gibi çeşitli özellikleri değiştirilebilmektedir.
HC06 modülü varsayılan olarak Slave modda çalışmaktadır. HC05 modülü ise hem Master hem de Slave olarak kullanılabilmektedir.
Özellikler
• Bluetooth Çipi: CSR BC417
• Bluetooth Versiyonu: Bluetooth 2.0+EDR(Enhanced Data Rate)
• Hafıza: Harici 8Mbit Flash
• Çıkış Gücü: -4 ~ +6dBm
• Çalışma Frekansı: 2.4GHz
• Hassasiyet: -80dBm
• Çalışma Gerilimi: 1.8 – 3.6V(Tipik: 3.3V)
• Çalışma Akımı(Max): 40mA
• Çalışma Sıcaklığı: -40 ~ +85 °C
• Haberleşme Arayüzü: UART
• Çalışma Alanı: 10m
• Boyutlar(Modül): 27x13x2mm
• Boyutlar(Modül Kartı): 43x16x7mm
http://www.robocombo.com/HC06-Bluetooth-Modulu-Pin-Cikisli
12V 1.3Ah Kuru Akü
Akü, elektrik enerjisini kimyasal enerji olarak depolanmasını sağlayan ve yeri geldiğinde depoladığı kimyasal enerjiyi elektrik enerjisine dönüştüren cihazdır. Ayrıca akülerle yalnızca DC gerilim depolaması yapılabilmektedir.
• Teknik Özellikler
• Nominal Voltaj: 13,5 – 13,8V
• 20Hr Kapasitesi: 1,3Ah
• Şarj Voltajı: 14,4 – 14,7V
• Boyut: 97x2551x57mm
• CE sertifikalı
Projede araç kiti üzerine eklenen Arduino UNO ile L298 Motor Sürücü Shield kullanılarak aracın kullanılması amaçlanmıştır. Uzaktan kontrol edilmesi için Android telefon ile HC06 Bluetooth modülü kullanılmıştır. Aracın üzerindeki sistemin çalıştırılması için gereken güç ise 12V kapasiteli bir kuru aküden karşılanmıştır.
http://www.robocombo.com/12V-13Ah-Kuru-Aku,PR-423.html
Aracın Arduino ve Android kodları ise şöyledir:
Arduino Kodu
int pwm1 = 10;
int pwm2 = 11;
int yon1 = 12;
int yon2 = 13;
int gelenVeri = 0;
void setup()
{
pinMode(pwm1, OUTPUT);
pinMode(pwm1, OUTPUT);
pinMode(yon1, OUTPUT);
pinMode(yon2, OUTPUT);
digitalWrite(pwm1, LOW);
digitalWrite(pwm2, LOW);
digitalWrite(yon1, LOW);
digitalWrite(yon2, LOW);
Serial.begin(9600);
}
void MotorKontrol(int mYon1, int mYon2, int pwmGiris)
{
digitalWrite(yon1, mYon1);
digitalWrite(yon2, mYon2);
digitalWrite(pwm1, pwmGiris);
digitalWrite(pwm2, pwmGiris);
}
void loop()
{
if (Serial.available() > 0)
{
gelenVeri = Serial.read();
if (gelenVeri == 10) // İleri
{
MotorKontrol(LOW, LOW, HIGH);
}
else if (gelenVeri == 20) // Geri
{
MotorKontrol(HIGH, HIGH, HIGH);
}
else if (gelenVeri == 30) // Sol
{
MotorKontrol(HIGH, LOW, HIGH);
}
else if (gelenVeri == 40) // Sağ
{
MotorKontrol(LOW, HIGH, HIGH);
}
else // Başka bir veri gelirse dur
{
MotorKontrol(LOW, LOW, LOW);
}
}
}
Arduino kodu, tamamen seri port üzerinden veri okuma ve okunan veriye göre dijital çıkışların high veya low yapma esasına dayanmaktadır. Bunun nedeni ise Android telefondan gelen verilerdir. Byte türündeki bu değerler okunarak gerekli şartları sağlaması durumunda motor sürücü tetiklenmektedir. Örneğin “10” değeri geldiği zaman araç ileri gidecek şekilde motor sürücüsü tetiklenmektedir. Hiçbir şartın sağlanmaması durumunda ise sürücü yine tetiklenerek motorların çalışmaması sağlanmaktadır. App Inventor ile yazılan Android blokları ise şu şekildedir:
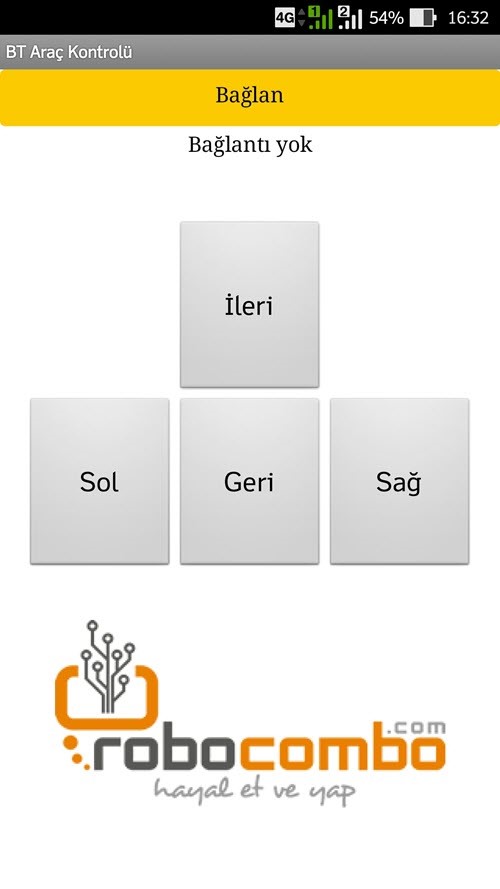
Android programın arayüzüne bakıldığında 4 adet yön butonu, 1 adet Bluetooth arama butonu ile Bluetooth durum label’i görülmektedir. Projede bulunan HC06 bluetooth modülü ile telefonun önceden eşleştirilmiş olması gerekmektedir. Eşleştirdikten sonra telefonun bluetoothu açılarak programa öyle giriş yapılır. Ardından “Bağlan” butonuna tıklanarak bulunan Bluetooth cihazlarından HC05 seçilerek telefonu aygıta bağlayın. Artık araç kullanmaya hazır hale gelmiştir.
Resimde görülen bloklar App Inventor ile yazılmış Android kodlarıdır. Kodun temel olarak Bluetooth cihazlarına bağlanmak ve her butona basıldığında ve el kaldırıldığında bluetooth cihazına veri gönderilmesi esasına dayanmaktadır. Butona basıldığı zaman hangi yöne hangi hızda gitmesi gerektiğine dair, el butondan kaldırıldığında ise motorlara verilen enerjinin kesilmesi için veri gönderilmektedir. Arduino tarafında ise Bluetooth modül ile alınan veriler gerekli şartları sağladığı zaman motorlara hareket verilmekte, şartlar sağlanmazsa motora giden enerjinin kesilmektedir.
http://www.robocombo.com/HC06-Bluetooth-Modulu-Pin-Cikisli,PR-1030.html
http://www.robocombo.com/4WD-Arac-Platformu-DIY,PR-1135.html
http://www.robocombo.com/Arduino-L298-Motor-Shield,PR-50.html
http://www.robocombo.com/12V-13Ah-Kuru-Aku,PR-423.html
– Node.js Kurulumu: Particle CLI, Node.js uygulamasını gerektirmektedir. Bu uygulamayı https://nodejs.org/ adresinden indirebilirsiniz.
– https://s3.amazonaws.com/spark-website/Particle.zip adresinden Particle windows sürücüsünü indirerek bilgisayarınıza kurmalısınız. Particle cihazınız bilgisayarınıza usb port üzerinden ilk takıldığında Windows \ Ayarlar \ Cihazlar \Diğer Cihazlar bölümünde USB Seri Cihaz (COMX) şeklinde görüntülenmektedir.

Cihaz Yöneticisi’nden Sürücü Yazılımını Güncelleştir seçeneğine tıklayarak Sürücü Yazılımı İçin Bilgisayarımı Tara seçeneğini tıklıyoruz.

İndirmiş olduğumuz Particle Windows Serial Driver klasörünü seçerek sürücümüzü yüklüyoruz.

– Windows komut istemini açarak npm install -g particle-cli komut satırını yazıp Particle CLI uygulamasını bilgisayarımıza kuruyoruz.
– http://www.chiark.greenend.org.uk/~sgtatham/putty/ adresinden indirebileceğiniz Putty uygulamasını kullanarak COM port üzerinden particle cihazımız ile bağlantı kurarak gerekli ayarları yapacağız.
Putty ile bağlantı kurmadan önce Putty üzerinde aşağıdaki ayarları yapmalıyız.
Serial bölümündeki ayarlar aşağıdaki gibi olmalı:

Session başlığındaki ayarlar ise aşağıdaki gibi olmalı:

Bu ayarların ardından Open butonuna bastığımızda terminal ekranı açılacak ve bu ekrandan vereceğiniz komutlar ile gerekli ayarları yapabileceksiniz. Bu ekranda kullanabileceğiniz komutlardan bazıları şunlardır:
i komutu : Cihazınızın id numarasını verir.

w komutu: Kablosuz ağ ayarlarının yapılmasını sağlar.
Bu bölümde sırasıyla aşağıdaki işlemler gerçekleştirilir. (Her işlemin ardından enter tuşuna basılmalıdır)
– SSID ismi girilir.
– Kablosuz ağ şifreleme türü rakamla seçilir.
– Kablosuz ağ şifresi girilir.

7 saniyelik bir bekleme süresinin ardından aşağıdaki ekran görüntülenerek ayarlar tamamlanır:

Eğer cihazınızın üzerindeki led cyan (cam göbeği) renginde olarak sürekli bir biçimde yanıyorsa gereken ayarlar başarılı bir biçimde yapılmış ve cihazınız Spark Cloud ile bağlantı sağlamıştır.
Eğer yeşil renkli yanıyorsa wi-fi ağına bağlanmıştır. Kırmızı renkli yanıp sönüyorsa bağlantı problemi vardır.

Photon wi-fi özellikli bir kartken, elektron ise gsm özellikli bir karttır. Photon kartının teknik özellikleri aşağıdaki gibidir:

– Particle PØ Wi-Fi module
– Broadcom BCM43362 Wi-Fi chip
– 802.11b/g/n Wi-Fi
– STM32F205 120Mhz ARM Cortex M3
– 1MB flash, 128KB RAM
On-board RGB durum ledi
– 18 GPIO pini
– Gerçek zamanlı işletim sistemi (FreeRTOS)
Spark serisi kartlar web ve mobil arayüzü üzerinden programlanabilmeleri, gelişmiş api desteği ve uygulama çıktılarını web üzerinden görüntülemeye izin veren hazır dashboard yapısı ile internet of things uygulamalarınız için güçlü bir alternatif oluşturmaktadır.
]]>